
プロジェクトのビルド
リンカオプションの設定
サンプルプロジェクトではdlライブラリが必要なので、リンカの設定を行います。
(SDSoCのバージョンが異なるとdlopenが見つからないというエラーが出るので、2017.2でしか動作しません)
Project ExplorerからFOC_Buildを右クリックし、C/C++ Build Settingsを開きます。

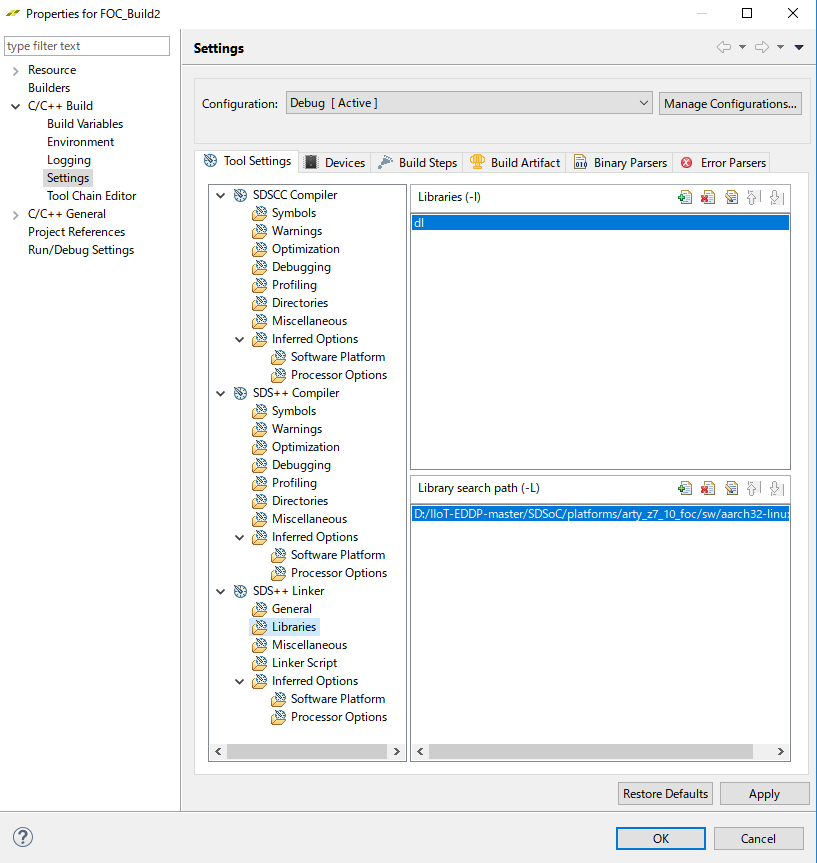
[C/C++ Build]→[Settings]でTool Settingsを出し、[SDS++Linker]にあるLibrariesをクリックします。Libraries(-l) の横にある+マークをクリックし、dlと入力してOKをクリックします。
次の図のようになればOKです。
プロジェクトのビルド
ハンマーボタンを押して、プロジェクトをビルドします。もしくは、Project ExplorerからFOC_Buildを右クリック、Build Projectをクリックします。
ビルドには20~30分程度かかります。
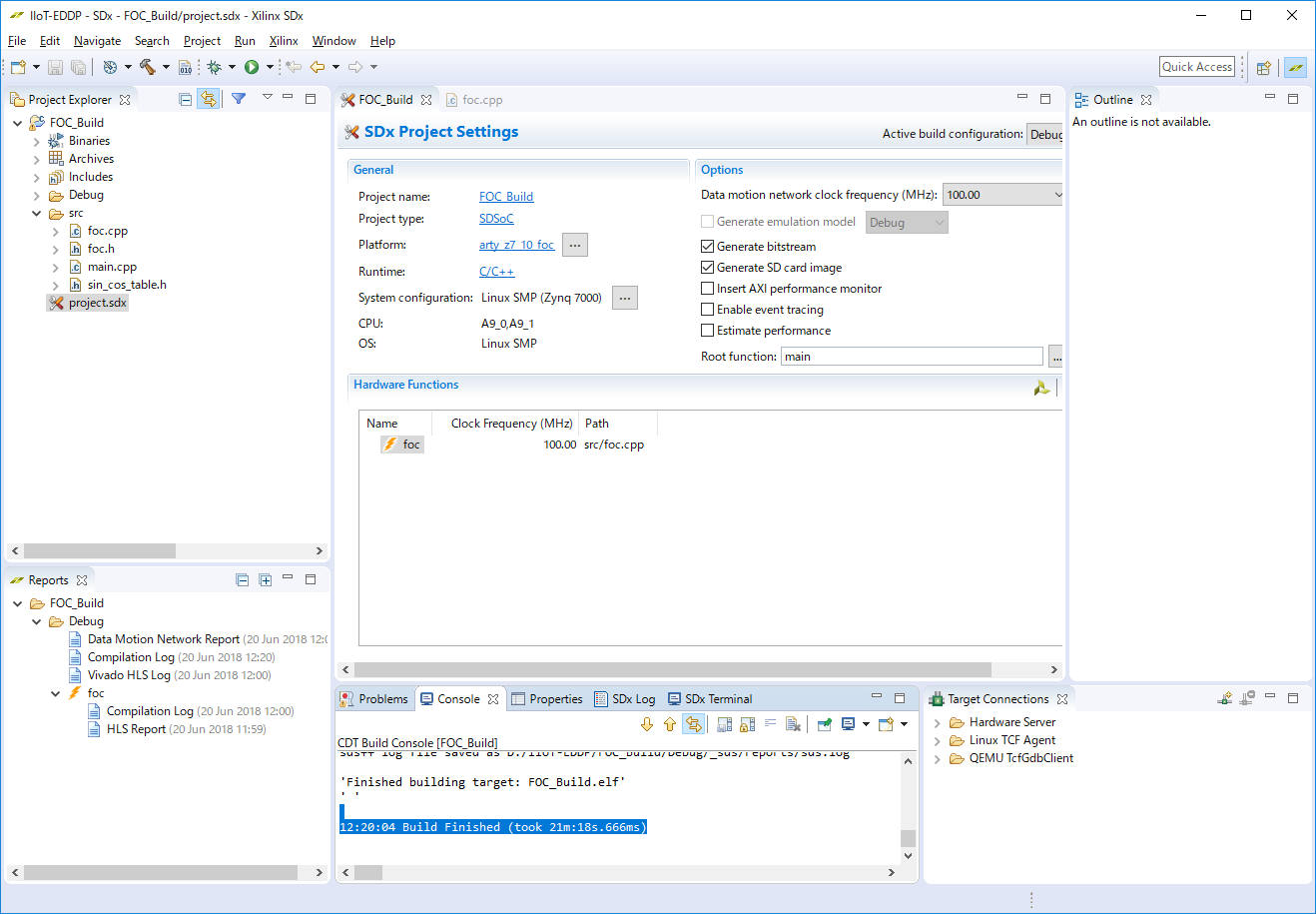
12:20:04 Build Finished (took 21m:18s.666ms)
ビルドが完了したときのプロジェクトの状態です。
ビルド完了後
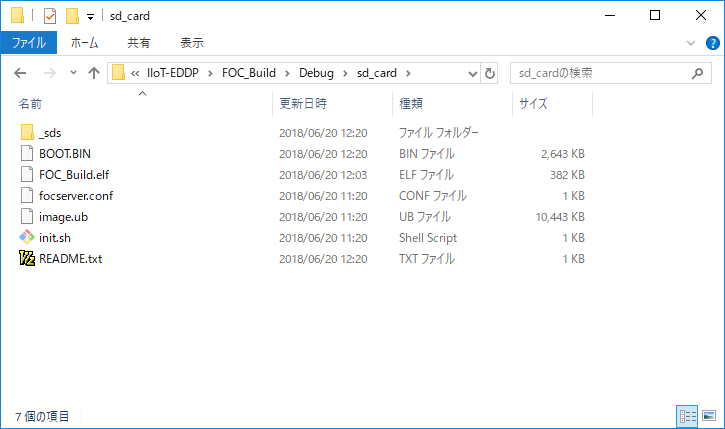
ビルドが完了するとDebugフォルダの中にsd_cardというフォルダが作られていて、この中にはLinuxのブートイメージやFPGAのbitstreamなどが含まれています。
以降は「制御プログラムの操作」の手順と同様です。
これらのファイルをSDカードに書き込んでブートすると、Linuxが動作して、モータコントロールアプリとWebコントロール画面が動くという仕組みになっています。
TEC0053キットの入手
TEC0053のご購入はこちらから行えます。